引言
随着科技的飞速发展,自动驾驶技术正从科幻走入现实。在这一变革中,人工智能 扮演着绝对核心的驱动角色。它不仅定义了车辆如何“看”世界,更决定了车辆如何“思考”与“决策”。而这一切能力的落地,都离不开坚实、高效、安全的 人工智能基础软件 作为支撑。本报告将深入探讨AI在自动驾驶开发中的关键应用,并剖析其底层软件开发的核心挑战与架构。
一、人工智能:自动驾驶的“大脑”与“感官”
自动驾驶系统可抽象为“感知-决策-控制”的闭环。AI技术贯穿其中:
- 环境感知:
- 计算机视觉:基于深度学习的卷积神经网络,如YOLO、SSD,实时识别车辆、行人、交通标志、车道线等。
- 多传感器融合:AI算法(如卡尔曼滤波的深度学习变体、注意力机制模型)高效融合摄像头、激光雷达、毫米波雷达的数据,构建精准、冗余的环境3D感知。
- 决策与规划:
- 行为预测:使用循环神经网络或图神经网络,预测周围交通参与者的未来轨迹与意图。
- 路径规划:结合强化学习与搜索算法(如A*),在复杂动态环境中规划出安全、舒适、高效的行驶轨迹。
- 控制执行:
- 使用深度学习或经典控制理论(经AI优化)生成精确的油门、刹车、转向指令,确保车辆平稳跟踪规划路径。
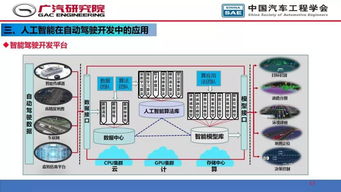
二、人工智能基础软件:赋能“大脑”的“神经系统”
要让上述AI模型在车规级硬件上可靠、高效地运行,离不开一整套基础软件栈。这构成了自动驾驶系统的“神经系统”。
- 核心架构:AI计算框架与中间件
- 训练框架:如TensorFlow、PyTorch,用于在云端大规模开发和训练复杂的感知、预测模型。其易用性和生态是关键。
- 推理引擎/运行时:如TensorRT、ONNX Runtime、TVM。它们将训练好的模型进行优化(算子融合、量化、剪枝)、编译,并部署到车载计算芯片(如英伟达Orin、地平线征程)上,实现极致的推理性能与能效。
- 数据流水线与版本管理:处理海量标注/非标注数据,管理模型训练、评估、部署的全生命周期,确保迭代可追溯、可复现。
- 关键挑战与解决方案
- 实时性与确定性:自动驾驶要求毫秒级响应。基础软件需提供硬实时调度、低延迟通信(如基于DDS的ROS2)和确定性推理保障。
- 安全与可靠:这是车规级软件的命脉。需遵循ISO 26262等功能安全标准,融入安全监控、冗余设计、故障恢复机制。对于AI模型本身,需研究可解释性AI、安全护栏和持续的场景验证。
- 异构计算与芯片适配:车载计算平台通常是CPU、GPU、NPU等组成的异构系统。基础软件(如驱动、编译器、调度器)需要高效管理和调度这些硬件资源,抽象硬件细节,为上层的AI应用提供统一的编程接口。
- 仿真与测试:基于AI的基础软件需要构建高保真的数字孪生仿真环境,用于进行海量的“影子模式”测试、极端场景复现和算法迭代验证,这是实车路测不可或缺的补充。
三、未来趋势与展望
- 端到端AI驾驶模型:从感知直接输出控制信号的端到端大模型正在探索中,这将进一步简化系统架构,但对基础软件的数据处理、模型训练与部署提出了更高要求。
- AI与功能安全的深度融合:如何系统性地论证AI组件的安全性,是行业公认的难点。未来基础软件需内置更强大的安全验证与保障工具链。
- 软件定义汽车与持续进化:基于强大的AI基础软件平台,车辆可通过OTA持续更新算法模型,实现功能的迭代与体验的进化,真正成为“可成长的智能体”。
结论
人工智能是自动驾驶技术突破的引擎,而人工智能基础软件则是让这个引擎稳定、高效、安全运转的基石与控制系统。从云端训练到边缘部署,从算法创新到芯片适配,一套成熟、开放、可靠的基础软件栈,是车企与科技公司构建自动驾驶核心竞争力的关键。随着AI技术的不断演进,与之配套的基础软件也必将朝着更高效、更安全、更易用的方向持续发展,最终推动全无人驾驶时代的到来。